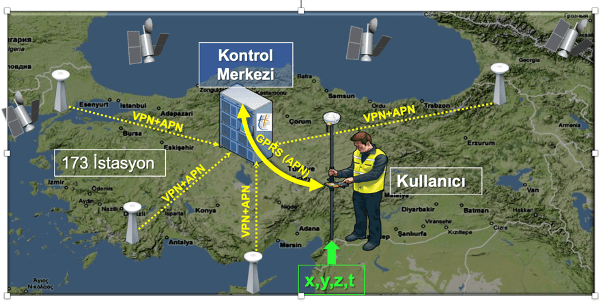
Birden fazla GNSS alıcısının eşzamanlı kullanımı ile göreceli bir yöntemle konum belirlendiğinden cm seviyesinde hassasiyet sağlar. Günümüzde GNSS teknolojisindeki gelişmeler, nokta konumlarının gerçek zamanlı olarak belirlenmesini sağlamıştır. İlk olarak cm seviyesinde gerçek zamanlı olarak nokta konumlarını belirleyen klasik RTK yöntemi geliştirilmiştir. Ancak bu yöntemde atmosfer, yörünge hatası ve sistemle ilgili etkileri önlemek için referans istasyonu ile kullanıcı arasındaki mesafe yasal olarak 5 Km. ile sınırlandırılmıştır. Bu nedenle, klasik RTK yöntemindeki sınırlamaların ortadan kaldırmak için, birden fazla sabit istasyon kurmak için yeni bir fikir önerildi. 1990’lı yıllardan bu yana, sürekli çalışan referans istasyonları (CORS), yüksek doğruluk gerektiren jeodezik ölçümler için kullanılmakta ve GNSS sistemlerine dayalı olarak cm seviyesinde gerçek zamanlı konum bilgisi sağlamaktadır. Bu düşüncenin hayata geçirilmesi ve edinilen deneyimler sonucunda sabit GNSS ağları (RTK ağı) ortaya çıkmıştır. Ağ RTK GNSS teknolojisi artık anlık konum verilerini yüksek doğrulukla elde etmek için yaygın olarak kullanılmaktadır. Türkiye’de, Mayıs 2009 itibariyle, dördü Kuzey Kıbrıs Türk Cumhuriyeti’nde bulunan TUSAGA-Aktif şebekesinde 173 istasyon bulunmaktadır. Bu sistem, tek bir referans istasyonuna bağımlılığı ortadan kaldırdı ve çok sayıda referans istasyonundan gelen verileri kullanarak belirli bir bölgenin atmosferik modellemesinin kullanılmasına izin vermektedir. Sistemin kontrol merkezi Tapu ve Kadastro Genel Müdürlüğünde bulunmaktadır ve 18 bin civarı kullanıcısı vardır. TUSAGA-Aktif’e abonelik ve diğer bilgileri için lütfen https://www.tusaga-aktif.gov.tr adresini ziyaret ediniz.
TUSAGA-Aktif Ağ-RTK Çalışma Prensibi
Ülkemizin ulusal Sabit GNSS (Global Navigation and Satellite Systems) istasyonu sistemi, TUSAGA-Aktif kullanım kolaylığı, düşük maliyeti ve yasal gereklilikler nedeniyle Türkiye’de mühendislik ve kadastro işlerinde yaygın olarak kullanılmaktadır. TUSAGA-Aktif kullanıcıları sistemin sağladığı üç farklı Ağ-RTK(Real Time Kinematic) düzeltme tekniğinden (FKP, VRS ve MAC) birini gezici GNSS alıcılarından seçerek düzeltme alabilmektedir. Yapılan testler sonucu elde edilen verilerin analizinden, üç düzeltme tekniğinin performanslarının genel olarak benzer olduğu ve sınırlı bir uydu görüntüsü durumunda bile, her üç teknikte de hataların 5 cm’nin altında kaldığı anlaşılmıştır. Ancak 2D ve 3D bileşenler birlikte analiz edildiğinde VRS tekniği diğer iki tekniğe göre daha iyi sonuçlar vermiştir. TUSAGA-Aktif Kontrol Merkezi FKP, MAC ve VRS tekniklerini kullanarak kullanıcıya düzeltme verileri gönderir. Gezici kullanıcılar düzeltmeleri en yakın GNSS istasyonundan değil Kontrol merkezinden alırlar.
Peki nedir FKP, VRS ve MAC ?
Ağ RTK Düzeltme Teknikleri
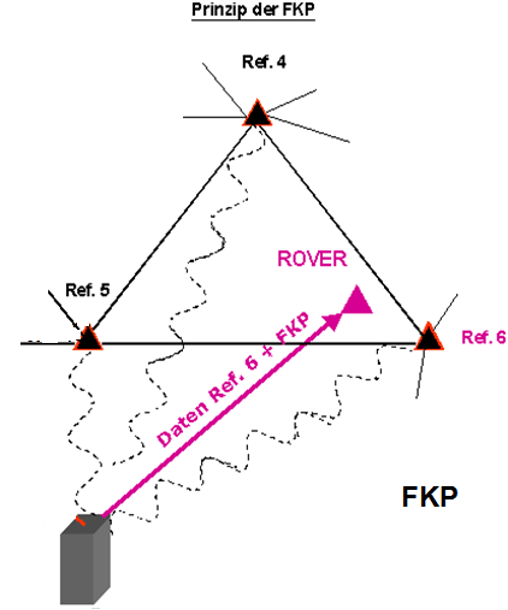
FKP (Flächen- Korrektur-Parameter)
Alan düzeltme parametresi olarak da bilinen FKP tekniği, Almanya ulusal CORS ağı olan SAPOS grubu (Satellitenpositionierungsdienst der Deutschen Landesvermessung) tarafından geliştirilen ilk Network-RTK düzeltmelerinden biridir. KP tüm ağdan hesaplanmış her bir kullanıcıya özel bir düzeltmeyi kullanıcı konumuna en yakın referans istasyonu esas alarak yayınlar. Referanstan uzaklaştıkça, hata miktarı artar.
FKP düzeltmelerinin içeriği, referans istasyonu çevresindeki doğrusal iyonosferik ve geometrik düzeltme parametreleridir. Bu doğrusal düzeltmeler, doğu-batı ve kuzey-güney yönlerindeki değişiklikleri ifade eder ve alıcının gerçek konumunun interpolasyon yoluyla tam olarak hesaplanması için kullanılır. FKP yöntemi, her referans yüzeyi için farklı bir FKP düzlemi oluşturur.

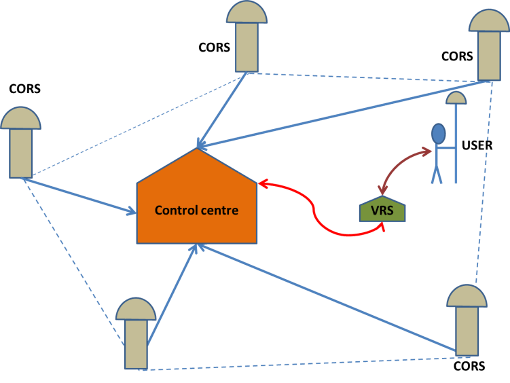
VRS (Virtual Reference Station)
VRS tüm ağdan hesaplanmış ve hatalardan ayıklanmış, her bir kullanıcıya özel düzeltmeyi kullanıcı ile birlikte hareket eden sanal bir referans istasyonu üzerinden yayınlar.
VRS, dünya çapında en yaygın kullanılan düzeltme tekniğidir. VRS, RTCM mesajı kullanılarak tüm GNSS alıcıları için kullanılabilir. VRS ayrıca diğer düzeltme tekniklerinden daha iyi performansa sahiptir. Ancak, düzeltmeler ancak gezici GNSS alıcısının tam konumu belirlendikten sonra iletilir. Bu nedenle, gezici GNSS alıcısı aynı kampanya süresi içinde önemli bir mesafe kat etmişse, yeni alıcı konumu için düzeltmeler yapılamayacaktır.
VRS yönteminde çalışan gezicinin yakınındaki referans istasyonunun doğrudan bir işlevi yoktur, ve geziciler referans istasyonlarına bağlanmaz. Araziye çıkan bir gezicinin o anki yaklaşık konumu, otomatik olarak kontrol merkezindeki yazılıma gider ve o konuma bir “Sanal Baz” istasyonu oluşturur. Bu sanal baz istasyonu o gezicinin tüm ağdan hesaplanan hataları ayıklanmış RTK düzeltmeleri aldığı referans istasyonu olur. Ağda çalışan gezici adedi kadar sanal referans istasyonu vardır.

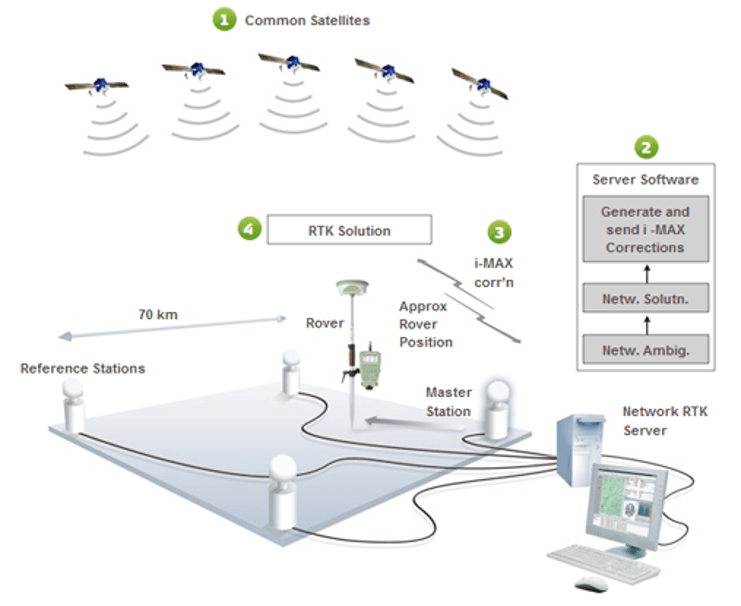
MAC (Master Auxiliary Concept)
MAC ; etrafındaki referans istasyonlardan gelen veriyi gezicinin kontrol ünitesinde hesaplar. Bu nedenle çok güçlü kontrol ünitesi gerektirdiği gibi, gelen veri miktarı çok fazladır ve hassasiyet süreye bağlı olarak değişir.
Ancak MAC tekniği VRS tekniğini geliştirerek, FKP’nin dezavantajlarını ortadan kaldırarak konum bilgisi elde eder. MAC bir ana ve birkaç yan referans noktasından oluşur. Her bir yan referans noktası ölçümleri ana kontrol merkezine gönderir ve gerekli düzeltmeyi tahmin etmek için istasyonlar arası bir düzeltme farkı kullanılır. Bu düzeltme ayrıca iyonosferik ve geometrik düzeltmelere ayrılabilir.
TUSAGA-Aktif VRS düzeltme bilgilerini RTCM 3.1 ve CMR+ 3.1 standartlarında, FKP (SAPOS) düzeltme bilgilerini RTCM 3.1 standardında, MAC düzeltme bilgilerini de RTCM 3.1 NET standardında ve DGPS düzeltme bilgilerini RTCM 2.1 standardı ile yayınlamaktadır.
